目录
DQN存在的问题
DQN是一个面向离散控制的算法,即输出的动作是离散的。对应到Atari 游戏中,只需要几个离散的键盘或手柄按键进行控制。
然而在实际中,控制问题则是连续的,高维的,比如一个具有6个关节的机械臂,每个关节的角度输出是连续值,假设范围是0°~360°,归一化后为(-1,1)。若把每个关节角取值范围离散化,比如精度到0.01,则一个关节有200个取值,那么6个关节共有20062006个取值,若进一步提升这个精度,取值的数量将成倍增加,而且动作的数量将随着自由度的增加呈指数型增长。所以根本无法用传统的DQN方法解决。
解决方案
使用Policy-Based方法,通过各种策略梯度方法直接优化用深度神经网络参数化表示的策略,即网络的输出就是动作。
DDPG
深度确定性策略梯度(Deep Deterministic Policy Gradient, DDPG)算法是Lillicrap 等人利用 DQN 扩展 Q 学习算法的思路对确定性策略梯度(Deterministic Policy Gradient, DPG)方法进行改造,提出的一种基于行动者-评论家(Actor-Critic,AC)框架的算法,该算法可用于解决连续动作空间上的 DRL 问题。
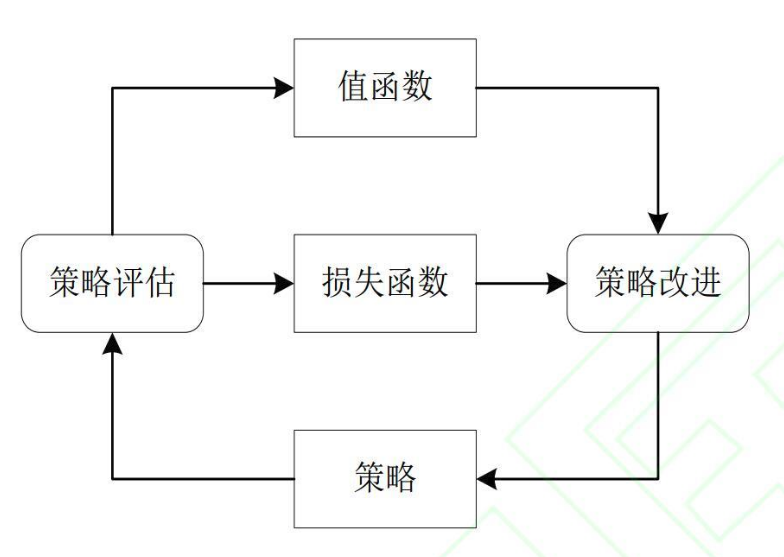
基于AC框架的深度策略梯度方法的学习结构